廠家供應(yīng)步態(tài)生物力學(xué)分析裝置
步態(tài)生物力學(xué)分析裝置�����,18618101725(微信同)����,QQ:736597338 ,信箱slby800@163.com
一站式3D動(dòng)作捕捉分析系統(tǒng)
之可神經(jīng)調(diào)控的步態(tài)動(dòng)作捕捉分析
靈活性
記錄
混動(dòng)動(dòng)作
數(shù)據(jù)分析
訪問(wèn)原始和處理過(guò)的運(yùn)動(dòng)學(xué)和動(dòng)力學(xué)數(shù)據(jù),以及創(chuàng)建用戶定義的公式和變量�。通過(guò)顯示標(biāo)準(zhǔn)偏差和/或散點(diǎn)圖的整體平均數(shù)據(jù)輸出執(zhí)行肌肉建模和數(shù)據(jù)縮減。單擊按鈕即可生成標(biāo)準(zhǔn)或定制的步態(tài)報(bào)告����。
自主步行
靈活性
神經(jīng)步態(tài)捕捉分析模型系統(tǒng),步態(tài)生物力學(xué)分析裝置,步態(tài)eeg emg整合系統(tǒng),神經(jīng)調(diào)控的步態(tài)捕捉分析系統(tǒng),人體運(yùn)動(dòng)步態(tài)分析系統(tǒng),神經(jīng)肌肉調(diào)控的步態(tài)捕捉分析系統(tǒng),步態(tài)特征捕捉分析系統(tǒng),步態(tài)肌電圖儀分析系統(tǒng),計(jì)算機(jī)斷層掃描增強(qiáng)步態(tài)捕捉分析系統(tǒng),步態(tài)控制分析系統(tǒng)
記錄
數(shù)據(jù)分析
自主步行
人體運(yùn)動(dòng)步態(tài)分析系統(tǒng),步態(tài)肌電圖儀分析系統(tǒng),步態(tài)肌電腦電整合分析系統(tǒng),步態(tài)生物力學(xué)分析系統(tǒng),神經(jīng)肌肉骨骼協(xié)調(diào)分析系統(tǒng),步分析系統(tǒng),步態(tài)肌電圖腦電圖整合分析系統(tǒng),步態(tài)捕捉分析系統(tǒng),行走動(dòng)力學(xué)分析系統(tǒng),計(jì)算機(jī)斷層掃描增強(qiáng)步態(tài)捕捉分析系統(tǒng)
步態(tài)再訓(xùn)練
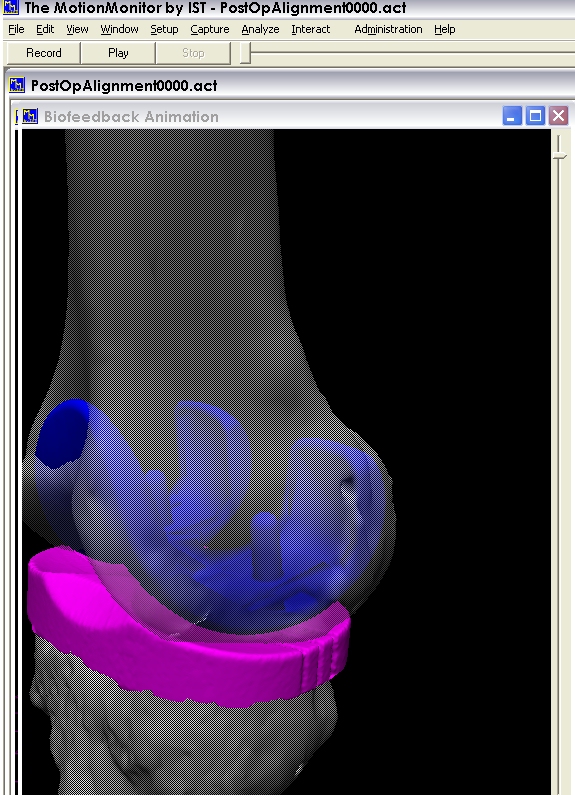
CT-MRI用于提取內(nèi)部標(biāo)記點(diǎn)
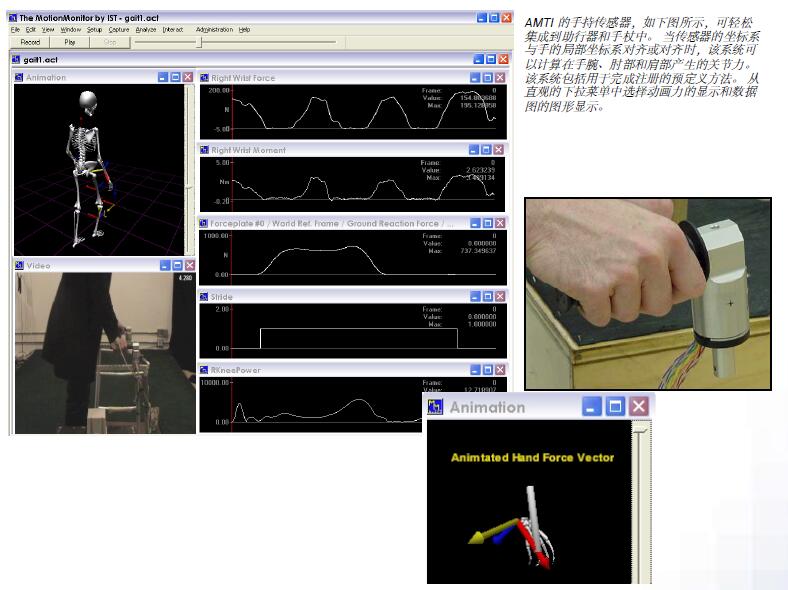
五、步態(tài)與上肢分析(Gait with Upper Extremity Analysis)
● 將 AMTI 的儀器步行器和手杖納入步態(tài)分析����。
●使用簡(jiǎn)單的下拉菜單輸出包括上肢關(guān)節(jié)力矩和力在內(nèi)的所有運(yùn)動(dòng)學(xué)數(shù)據(jù)。
●將傳感器力和力矩與手的局部坐標(biāo)系注冊(cè)并對(duì)齊��。
●使用測(cè)力板沖擊或腳踏開(kāi)關(guān)觸發(fā)數(shù)據(jù)采集�����,免提采集�。
●按體重、身高����、步態(tài)周期百分比和步幅對(duì)數(shù)據(jù)進(jìn)行標(biāo)準(zhǔn)化�。
●自動(dòng)集成平均輸出數(shù)據(jù)��。 顯示標(biāo)準(zhǔn)偏差和/或散點(diǎn)圖�����。
●創(chuàng)建用戶參數(shù)化數(shù)據(jù)庫(kù)���,用于主題數(shù)據(jù)的比較分析��。
更多于臨床,生物力學(xué)��,神經(jīng)控制和涉及復(fù)雜運(yùn)動(dòng)分析的體育yao物等應(yīng)用���,請(qǐng)咨詢產(chǎn)品顧問(wèn):

我公司另外同一站式細(xì)胞組織材料生物力學(xué)和生物打印等生物醫(yī)學(xué)工程科研服務(wù)-10年經(jīng)驗(yàn)支持
2�、為分析異常步態(tài)原因和矯正異常步態(tài)���、制訂治liao方案提供必要的依據(jù)
參與的主要肌肉活動(dòng)
1.豎脊?�。涸诓叫兄芷谡玖⑾喑跗诤湍┢?���,豎脊肌活動(dòng)達(dá)到高峰,以確保行走時(shí)軀干正直����。
2.臀大肌:在擺動(dòng)相后期使向前擺動(dòng)的大腿減速��,在支撐相��,臀大肌起穩(wěn)定骨盆�����、控制軀干向前維持髖關(guān)節(jié)于伸展位的作用 ���。
4.股四頭?����。弘x心性收縮以控制膝關(guān)節(jié)屈曲度�����,從而使支撐中期免于出現(xiàn)因膝關(guān)節(jié)過(guò)度屈曲而跪倒的情況��。
5.縫匠?����。鹤饔脼榍y和屈膝關(guān)節(jié)����。
6.腘繩肌:在擺動(dòng)相末期��,離心性收縮使小腿向前的擺動(dòng)減速���,以配合臀大肌收縮活動(dòng)(使大腿向前擺動(dòng)減速)�,為足跟著地做準(zhǔn)備����。足跟著地時(shí)及著地后�,腘繩肌又作為伸髖肌,協(xié)助臀大肌伸髖�,同時(shí)通過(guò)穩(wěn)定骨盆,防止軀干前傾����。
7.脛前肌:足跟著地時(shí),離心性收縮以控制踝關(guān)節(jié)跖屈度�,防止在足放平時(shí)出現(xiàn)足前部拍擊地面的情況。足趾離地時(shí)���,控制或減少此時(shí)踝關(guān)節(jié)的跖屈度�,保證足趾在擺動(dòng)相能夠離開(kāi)地面�����,使足離地動(dòng)作順利完成�����。
8.小腿三頭?。弘枘c肌在行走、跑�����、跳中提供推動(dòng)力��,比目魚(yú)肌富含慢性�、抗疲勞的紅肌纖維,主要與站立時(shí)小腿與足之間的穩(wěn)定有關(guān)���。二者在站立相�,能固定踝關(guān)節(jié)和膝關(guān)節(jié),以防止身體向前傾斜���。